
11.2. APLICACIÓN EN CINEMÁTICA DIRECTA E INVERSA. Copy
A lo largo de la historia la ingeniería y las matemáticas se han desarrollado en forma paralela. Todas las ramas de la ingeniería dependen de las matemáticas para su descripción, es por eso que en este tema analizaremos otra aplicación más de la trigonometría en el campo de la robótica.
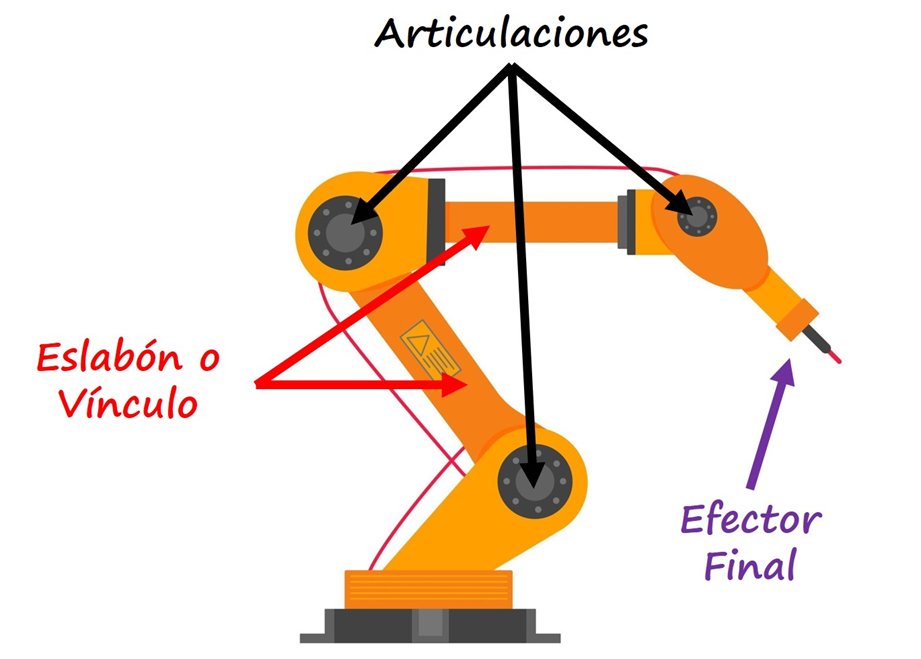
Actualmente, en la industria se pueden encontrar una gran variedad de robots manipuladores con diferentes articulaciones que dependen según el trabajo a desempeñar (figura 1).
12.2.1. CINEMÁTICA DE UN ROBOT
La cinemática de un robot estudia el movimiento del mismo con respecto a un sistema de referencia fijo sin considerar las fuerzas y momentos que originan dicho movimiento. Existen dos problemas fundamentales en la cinemática del robot:
- Problema cinemático directo. Determina la posición y orientación del extremo del robot, efector final, con respecto a un sistema de coordenadas de referencia, esto conociendo los valores de las articulaciones y los parámetros geométricos de los elementos del robot.
- Problema cinemático inverso. Obtienen los valores de las posiciones articulares, conocida la localización del efector final.
12.2. CINEMÁTICA DIRECTA
Una forma de abordar el problema cinemático directo es por medio del método geométrico. El método geométrico es un método no sistemático que utiliza relaciones geométricas para obtener directamente la posición del extremo del robot.
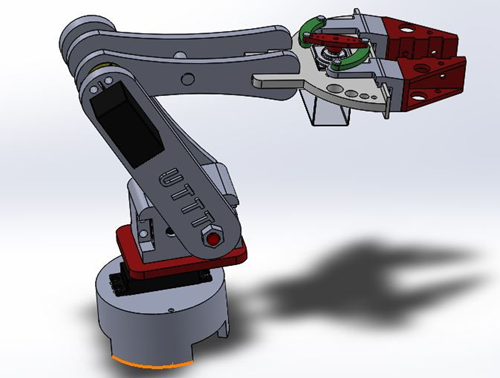
EJEMPLO 1: Consideremos un brazo robótico como el de la figura tomando en cuenta solo dos grados de libertad. Cada articulación cuenta con un motor de precisión, el cual permite colocar el eslabón en la posición angular deseada.
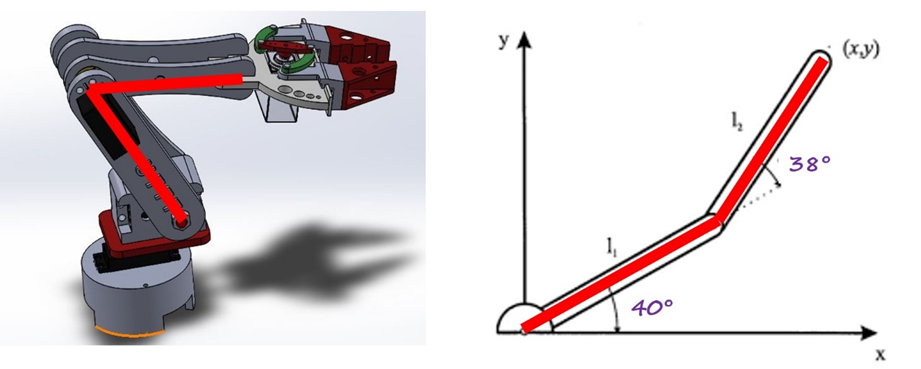
Suponiendo que el eslabón 1 y 2 tienen una longitud de 30cm y 35cm, respectivamente. Hallar la posición del efector final, si el primer motor está colocado a 40° con respecto a la horizontal y el segundo está a 38° con respecto a la línea formada por el eslabón 1.
Este es un ejemplo de la cinemática directa, ya que tenemos que encontrar la posición del extremo final del brazo robótico dados los ángulos y las longitudes de los eslabones.
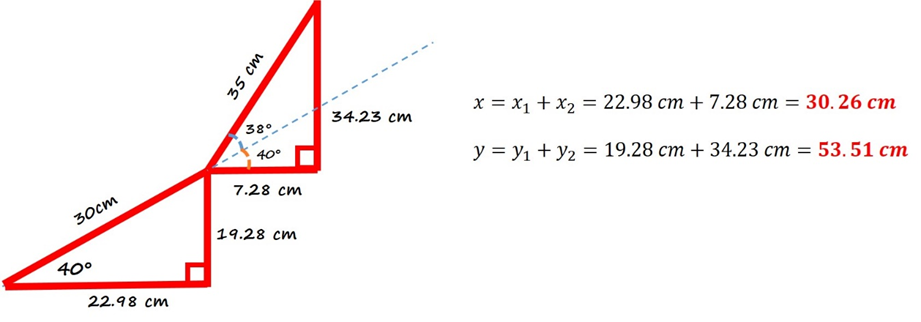
PASO 1: Dibujar un diagrama en 2 dimensiones con las especificaciones dadas por el problema.
PASO 2: Como se observa en la figura, se forman dos triángulos rectángulos en donde sus hipotenusas son los eslabones del brazo. El objetivo de la cinemática directa es encontrar la posición del efector final mediante sus coordenadas x y y, las cuales obtendremos por medio del análisis de los 2 triángulos rectángulos formados. Como lo vimos en la sesión 2.4 (Ángulos entre rectas paralelas y recta secante), podemos obtener el valor del ángulo C, el cual tendrá el mismo valor que el ángulo A. Por lo tanto, el ángulo del segundo triángulo rectángulo será la suma del ángulo B más el ángulo C (38° + 40°= 78°).
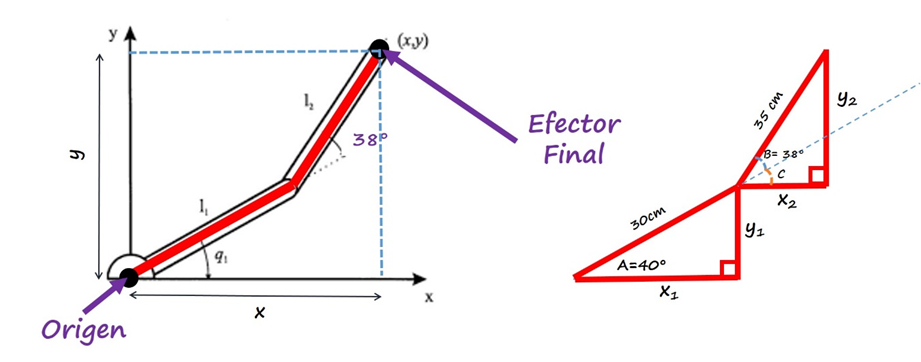
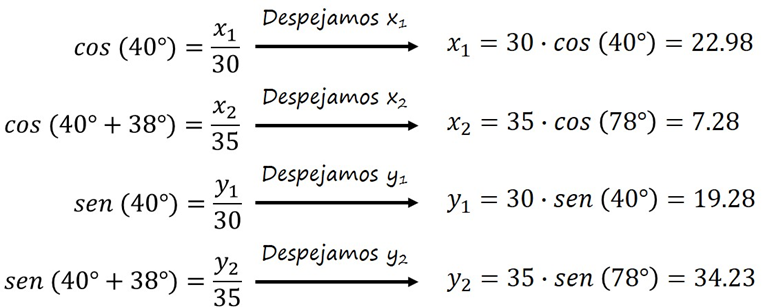
PASO 3: Obtenemos los valores de x1, x2, y1 y y2 mediante las razones trigonométricas coseno y seno respectivamente.
PASO 4: Obtenemos el valor de x y y, el cual será la suma de sus componentes:
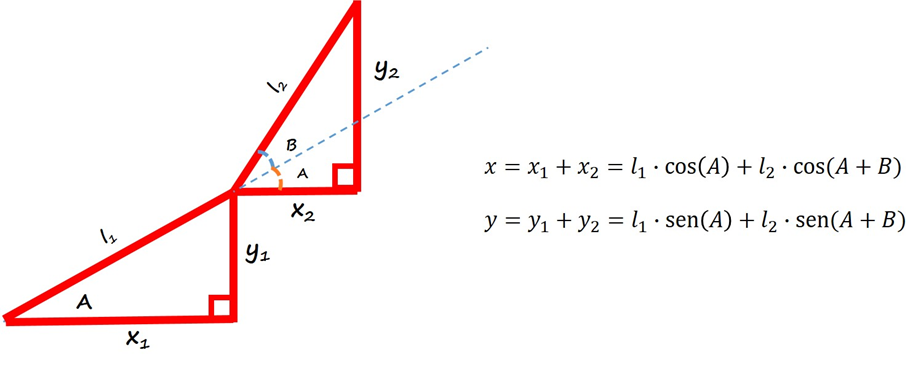
En caso de que queramos generalizar el procedimiento descrito anteriormente, lo podemos hacer mediante las siguientes fórmulas:
12.2. CINEMÁTICA INVERSA
La cinemática inversa se refiere a que, conocida la ubicación del efector final, tenemos que encontrar la posición de las articulaciones y los parámetros geométricos de los elementos del brazo robótico. La resolución de este tipo de problemas no es sistemática, ya que depende fuertemente de la configuración del robot.
Para entender este procedimiento favor ver el siguiente video: